Part 1 of this series discussed the sub-$500 XV-11 and RPLIDAR units that are available at the lowest end of the price range. This part of the series discusses lidar units in the $1,000 – $10,000 range. Part 3 will conclude the series with a hands on look at the NV-11, once I’ve received the one I’ve ordered and have had a chance to explore its use.
Deeper Pockets
$1,000 – $10,000 is out of reach for most individual hobbyists, but not unreasonable for a team project or not-particularly well-funded research team. In this price range, you get upper end low-range devices intended for indoor use, but you also move into devices with much longer ranges, intended for indoor or outdoor use, and the recently announced Velodyne Puck provides a new level of performance for a lidar costing less than $10,000.
Comparison Chart
The chart below, drawn from multiple sources on the web, provides some of the key performance characteristics for $100 – $8,000 lidar units described in the article. Also included for comparison is a $29,900 unit. There are additional factors to consider when purchasing a lidar unit. The purpose of the chart is to give an idea of what performance is available at what price points.
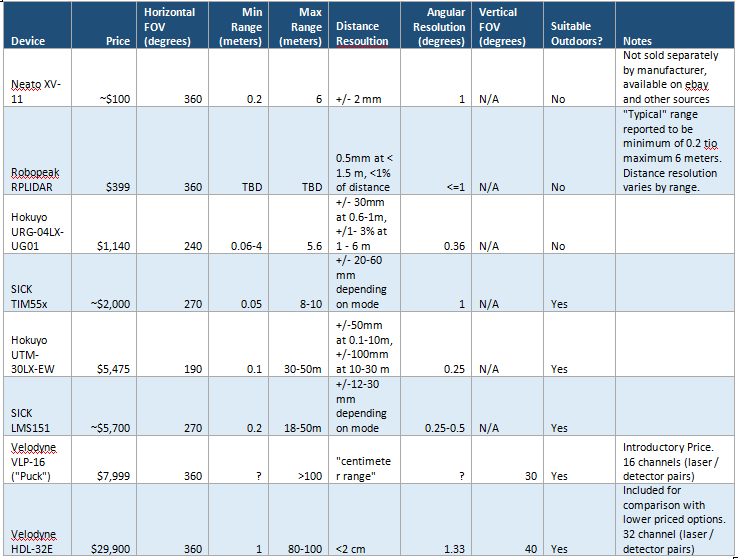
Lidar Comparison Table
What You’ll Get for Your Money
If you have less than $1,000, you can get a 2D scanning lidar unit for indoor use with limited range (up to about 6 meters). The lidar will use triangulation rather than time of flight to determine distance. However, the performance appears to rival that of units costing over $1,100, so if you only need a short-range indoor unit, a Neato XV-11 or RPLIDAR is worth considering. the extra cost of the RPLIDAR gets software and support. The XV-11 is only available from resellers who get them from Neato robotic vacuum cleaners. While not supported by the manufacturer, the community had developed drivers, interfaces, and other software for this unit.
If you’re looking for something with a longer range and/or for outdoor use, you’re going to need to spend at least $2,000. In the $2,000 – $6,000 price range you’ll find units rated for outdoor use, with maximum ranges between 8 and 50 meters. These will be 2D scanning units that use time of flight to measure distance. Some of these units can process multiple returns from each pulse, giving an indication, for example, of the height of vegetation if measured from above.

Mid-Priced Hokuyo UTM-30LX-EW lidar
Up until very recently, if you wanted to take the next step up to a 3D scanning, long range, outdoor unit, you needed about $30,000. However the newly announced Velodyne VLP-16, aka, Velodyne Puck will deliver this level of performance at under $8,000. It has 16 channels to scan a 30 degree vertical field of view with each rotation and covers a full 360 degrees.

Velodyne “Puck” 3D Scanning lidar
While not as capable as the Velodyne HDL-32E, included in the above chart for comparison, it is the first multi-channel, 3D scanning, long-range lidar available for less than $10,000. While not as capable as the higher end unit, it also costs less than 1/3rd the price. It will be interesting to see if automated passenger car researchers can utilize this new, lower cost unit.
Still to Come
Part 3 will describe my experience with an XV-11 unit, once it arrives and I have a chance to play around with it.